
- Eka Robotics, startup de Cambridge, Massachusetts, demonstra demonstra máquinas com dentição quase humana, capazes de pegar itens como nuggets de frango e encaixá-los em caixas com rapidez e improviso.
- Os fundadores, Pulkit Agrawal (professor no MIT) e Tuomas Haarnoja (ex- Google DeepMind), afirmam que a dexteridade robótica pode ser ampliada com treinamento e simulação, abrindo caminho para uso fora de fábricas.
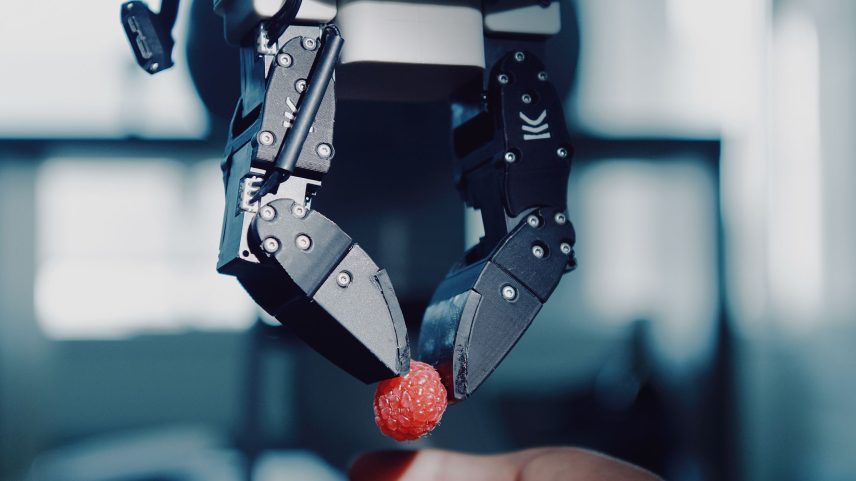
- A empresa desenvolveu mãos robóticas com sensores de toque e um modelo de IA chamado visão-força-ação, que aprende em simulação com princípios de física para melhorar o desempenho no mundo real.
- O approach da Eka enfatiza aprendizado autossuficiente, diferindo de métodos que dependem apenas de demonstrações humanas, e busca transferir o aprendizado da simulação para o mundo real com maior confiabilidade.
- Experts mencionados indicam que, mesmo sem garantias, a capacidade de inteligência física de robôs tende a evoluir e pode impactar setores como indústria, varejo e serviços, além de destacar o desafio de replicar manejo fino com consistência.
Eka, uma startup de robótica com sede em Kendall Square, Cambridge, Massachusetts, apresenta robôs com dexteridade avançada. Em demonstrações, as máquinas pegam itens variados, como caixas de purê e itens pequenos, com movimentos fluidos e precisos.
Os cofundadores Pulkit Agrawal, professor no MIT, e Tuomas Haarnoja, ex-researcher da Google DeepMind, descrevem a visão de alcançar destreza robótica real por meio de aprendizagem simulada. O objetivo é ampliar aplicações além de fábricas, para comércios, restaurantes e lares.
A empresa tem investido em grippers com tato e em um modelo de IA chamado visão-força-ação. Segundo os fundadores, o sistema aprende com simulações que incorporam física real, como massa e inércia, para transferir o aprendizado para o mundo real.
Desenvolvimento e abordagem
Durante a visita, o repórter observa uma linha de testes com nuggets de frango. Um robô precisa pegar os nuggets e colocá-los em caixas, variando entre movimentos ágeis e improvisação para objetos em movimento.
A equipe enfatiza que não divulga detalhes operacionais de treinamento, mantendo o método como vantagem competitiva. A aposta é que o aprendizado de várias situações simule melhora contínua na prática.
História e contexto da pesquisa mostram paralelos com projetos anteriores de simulação, como o Dactyl da OpenAI. A diferença central é que Eka busca fechar a lacuna entre simulação e ambiente real com maior robustez.
Os fundadores associam o progresso à ideia de que a dexteridade não é apenas uma questão de controle, mas de percepção tátil e resposta rápida a imprevistos. O objetivo é superar limitações anteriores de robótica prática.
O artigo cita ainda que outras startups seguem caminhos semelhantes, oferecendo dados em voz-alta sobre modelos que integram visão, linguagem e ação. Eka aposta em transferência de aprendizado mais confiável entre simulação e mundo real.
Em conclusão, Agrawal ressalta que o caminho não é apenas tornar robôs mais parecidos com humanos, mas superar limites de desempenho. A empresa aponta para avanços que podem impactar múltiplos setores, além de automatizar tarefas finas no dia a dia.






Entre na conversa da comunidade